main
To the list of lectures
|
Dynamics of rotational motion.
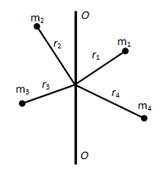
The moment of inertia of the system with respect to the axis of rotation is called a physical quantity that is equal to the sum of the product of the masses n material points of the squares of their distances from the axis of.
The moment of inertia of the body in the event of a continuous distribution of mass is
-integrated throughout.
Square ring
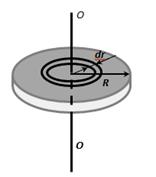
2. Walled hollow cylinder of radius R (a hoop, a bicycle wheel, and the like).
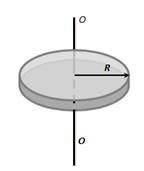
3. Solid cylinder or disk of radius R
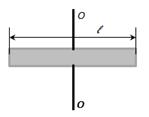
4. Direct thin long rod axis is perpendicular to the rod and passing through its middle.
If you know the moment of inertia about an axis passing through its center of mass, moment of inertia about any axis parallel to this, is determined with the help of Theorem Steiner: the moment of inertia with respect to the I axis of rotation is parallel to the moment of inertia ІC relatively parallel to the axis passing through the center of mass C body, with a folded piece of body mass m and the square of the distance between the axes of the
6. The moment of inertia of a straight rod length, the axis perpendicular to the rod and passing through its end.
§ 2 The kinetic energy of rotation
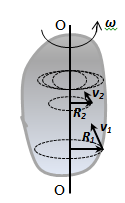
If we break the body in small amounts to the elementary masses m1, m2 ... at a distance r1, r2 ..., from the axis of rotation, the kinetic energy of the body can be written as
It is known that
From a comparison of WK rot with Wk translational motion If the body is involved in translational and rotational motions at the same time, it
For example, a cylinder rolling without slipping on a plane.
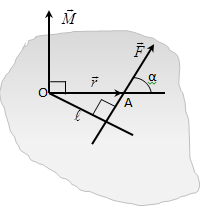
§ 3 Torque. The dynamic equation of rotational motion of a rigid body
- where
-strength shoulder on force The moment of a force
Axis,
whose position in space remains unchanged during the rotation around
the body in the absence of external forces, called the free axis of the
body. We find an expression for rotational motion of the body. Let the mass m solid external force
Feasible in the mixed product of vectors a cyclic permutation of the factors
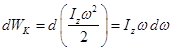
Work rotation of the body is the product of the moment of the force on the angle of rotation of the body dφ. Work is to increase its kinetic energy:
Then
or
If the axis of rotation coincides with the main axis of inertia through the center of mass, then the vector equality
I - principal moment of inertia (moment of inertia with respect to the main axis) § 4 The angular momentum. The law of conservation of angular momentum Angular momentum of a particle A relative to a fixed point 0 is a physical quantity, defined by the vector product
Angular momentum of a rigid body about a fixed axis Z
is called a scalar quantity equal to the projection on the axis of
the angular momentum, defined relative to an arbitrary point O that axis. The value of the angular momentum Lz is independent of the point O on the axis Z.
Differentiate with respect to dt
- the basic equation of the dynamics of rotational motion.
In a closed system the moment of the external forces is zero
The law of conservation of angular momentum: the angular momentum of a closed system is conserved, ie does not change over time.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||