main
To the list of lectures
|
§ 5 Force. Kinds of forces
Force - a vector quantity is a measure of the mechanical action on the body under consideration by other bodies. The forces that impose bodies acceleration or distorting them can split into two groups: b) concentrated force, that is, attached to a specific location of the body - at a point along a line or surface of the body. In this case, the action of an external force is transferred from one part to the other because of the existence of mutual relationships between them (this leads to deformation).
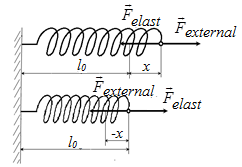
I elastic force. Under the forces applied to the body, it is deformed. If the termination of the powers the body takes its original size and shape, the deformation is called elastic, and if you do not restore the shape and size, the strain - inelastic. Elastic deformations are observed when the applied force is less than the limit of force at which a inelastic deformation (the so-called elastic limit)
From experience, it follows that at small strains extension springs X is directly proportional to the tensile strength.
by the law of Newton III
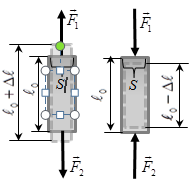
Hooke's law: the elastic force Felast directly proportional to the strain (displacement) X. The coefficient of proportionality in Hooke's law is called the spring constant (stiffness)- k. The rod acts like a spring. If by the end of the rod to attach equal F1 = F2 = F is uniformly distributed over the surface of the rod S forces directed along the axis, the initial length of the bar will change to. To characterize the deformation of the rod is introduced relative change in its length ε-relative deformation.
Physical quantity that is numerically equal to the elastic force dFelast per unit area dS section of the body is called stress.
If force dFelast along the normal to the area dS, called normal stress and is denoted by σ. If dFelast tangential to the area dS - tangent and is denoted τ. Hooke's law (for the rod): voltage elastically deformed body is directly proportional to the strain Young's modulus E is the elastic modulus, which is numerically equal to the voltage that occurs when the strain is equal to one. The value of α = 1 / E is called the coefficient of elasticity.
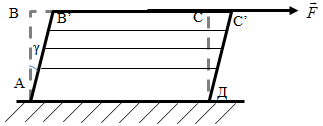
Shift is called the deformation of the body, in which all of its flat layers parallel to a shear plane, For a small shift
γ - shift angle or the relative shift in radians.
G-shear modulus, is equal to shearing stress at the relative shift tg γ = 1, therefore, γ = 45° (although almost all substances are destroyed at much lower corners).
(rotation of the Earth does not take into account).
Power
2nd Newton's Law:
The 3rd Newton's Law:
Then
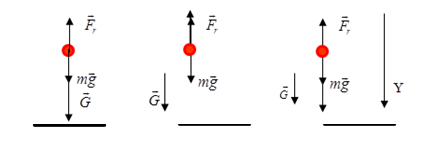
Projection on the Y axis
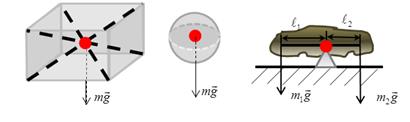
Weight is the force of gravity. 2 System is accelerated up
Weight greater than gravity. III system is accelerated down
|