main
To the list of lectures
|
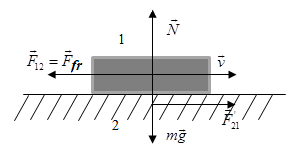
§ 3 Newton's Third Law
Newton's III
law is not always valid. It is strictly valid in the case of contact
interactions, as well as the interaction of some distance from each
other stationary bodies.
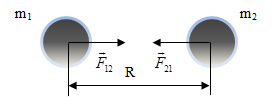
IV. The law of gravity: Two point bodies attract each other through space with a force directly proportional to the two masses and inversely proportional to the square of the distance between them
γ - the gravitational constant (numerically equal to the force of mutual attraction 2 material points of unit mass at a distance of 1 m).
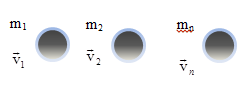
§ 4 The law of conservation of momentum
The forces of interaction between the bodies that make up the system, let fk. Interaction of external forces from the body not in the file system on the i body system denoted Fi.
On Newton's third law:
Vector sum of the momenta of all bodies forming this system is called the resultant momentum of the system.
If
external forces no effect on the body system (no interaction between
bodies within the system and external bodies), or the action of
external forces is compensated, then the system is called a closed or isolated.
The law of conservation of momentum: LCM:
Example 1: A perfectly elastic collision LCM:
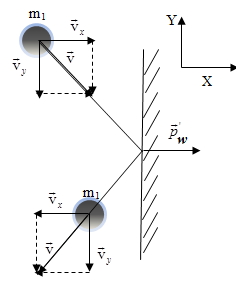
The projection on the axis of x: Example 2: An elastic ball hit on a fixed wall
|