main
To the list of lectures
|
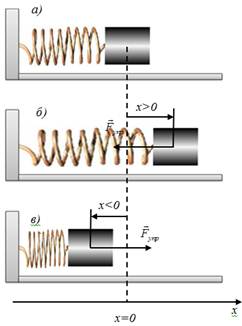
§2 Spring pendulum. Elastic and quasi-elastic forces. The equation of a vibratingspring
2) direction opposite to the direction of the force displacement, ie force is always directed towards the equilibrium position (at х > 0, Fel < 0, при х < 0, Fel > 0) 3) In equilibrium х = 0 и Fel = 0. On a Hooke's law Fel = -kх.
System consisting of a material point of mass m and absolutely elastic spring with spring constant k, which may be free oscillations of the pendulum is called.
ie
then
and
If power is not in their nature elastic, but subject to the law F = - kx, it is called quasi-elastic force. Obtain the equation of the pendulum. We take into account in the record of the second law of Newton, that
then
- differential equation point oscillates (differential equation of the pendulum).
- - oscillating point equation (the equation of a vibrating spring).
- - natural frequency of oscillations.
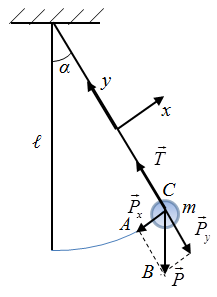
§3 Mathematical and physical pendulums. Mathematical pendulum - point mass suspended on a weightless inextensible thread, and oscillate in a vertical plane under the influence of gravity. Material point - a body whose mass is concentrated in the center of mass and size in terms of this problem can be neglected.
M – themoment of forces, I – a moment of inertia, ε – a angular acceleration.
Resultant force Of the triangle ABC ie
Thus, the oscillations of a mathematical pendulum occur under the quasi-elastic force - gravity.
The minus sign takes into account that the vectors Having reduced in (2) on m and
At small angles of oscillations α = 5 ÷6° ,
Label input
obtain the differential equation for the oscillations of a mathematical pendulum
Its solution:
-- the equation of a mathematical pendulum. One can see that the angle α varies as the cosine . α0 - amplitude, ω0 - cyclic frequency, φ0 - an initial phase.
- the period of oscillation of a mathematical pendulum
At small angles of oscillation
Then we put
get
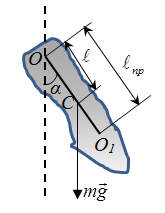
-the differential equation of a physical pendulum .
-the period of oscillation of a physical pendulum Equating TPhys = Tmat: :
therefore, a mathematical pendulum with length
has the same period of oscillation, and this physical pendulum. |